Robotik-Hobby
Robotik-Hobby
|
Video-Clip: |

|
| Video herunterladen (2,7 MB) |
|
Technische Daten |
|
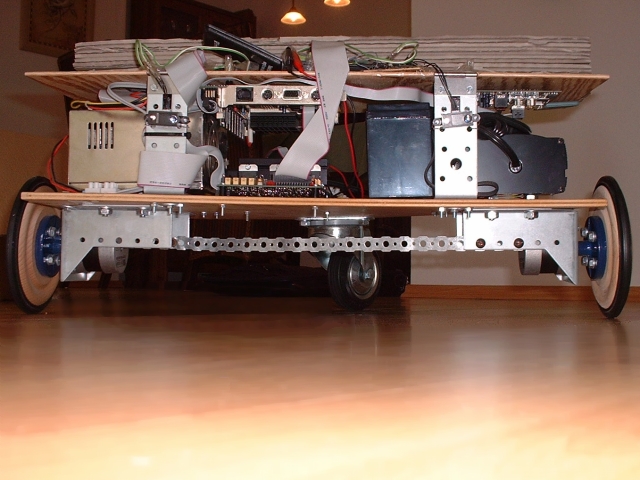
| Typen-Bezeichnung | AU/2311 (Autonomous Unit) |
| Fertigstellungs-Datum | 18.06.2002 |
| Kurzbeschreibung |
|
| Spannungsversorgung | Blei-Akku 12V |
| Leistungsaufnahme | 60W (36W im Standby-Betrieb) |
| Sensorik | 2 x Sharp GP2D02 |
| Motoren | 2 x Schrittmotor 500 mNm |
| Ausweich-Algorithmus | Heuristisch; Vektor-basiert |
| Verbindung zur Basisstation | TCP / IP über DECT |
| Telemetrie | Positionsbestimmung durch Auswertung der Motorschritte |
| Betriebssystem | Linux |
|
Technische Daten |
|
| Typen-Bezeichnung | C.E.R.L. 1.2 (Control Environment for Remote access & Live monitoring) |
| Fertigstellungs-Datum | 29.09.2003 |
| Kurzbeschreibung |
|
| Wegsuch-Algorithmus | Heuristisch; Vektor-basiert |
| Verbindung zum Roboter | TCP / IP über DECT |
| Betriebssysteme | Windows 95, 98, Me, XP |
Impressum