Geschichte des Robotersystems Dr-Aix
Geschichte des Robotersystems Dr-Aix
| Fertigstellung | Hardware | Software |
| Mai 1997 (Hardware und erste Software-Codelinie) | Basisstation: DOS-PC und Fernsteuerung Robotersteuerung: Fernsteuerempfänger kein Foto (ähnlich der Version in der nächsten Zeile, mit anderen Motoren) | Erste Codelinie (C++)
Zweite Codelinie (C)
Dritte Codelinie (C++)
|
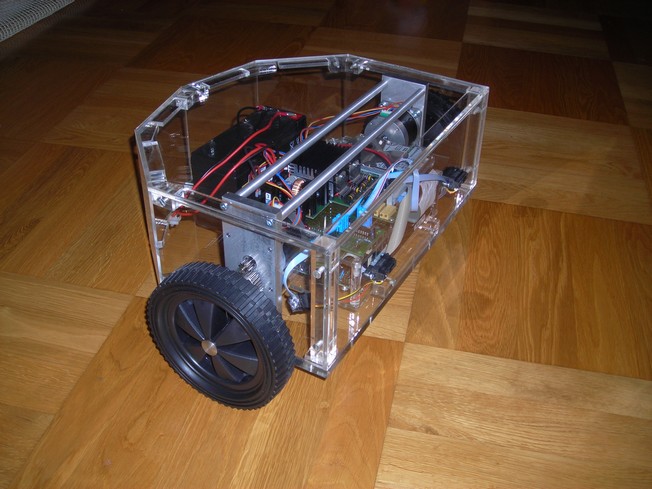
| November 1998 | MarsB0.5
Basisstation: Windows-PC Robotersteuerung: Windows-PC | Vierte und endgültige Codelinie (C++) |
| 16. Mai 2000 | MarsB1.0 (Wechsel der Schrittmotoren-Steuerchips - Link zu den Details)
| Vierte und endgültige Codelinie (C++) |
| Ab 17. Mai 2000 | MarsC0.1
Robotersteuerung: Windows-Laptop | Vierte und endgültige Codelinie (C++) Hermes
|
| Herbst 2000 | MarsC0.2
Robotersteuerung: Endgültige Technologie: Linux-PC-Board | Vierte und endgültige Codelinie (C++) |
| 2001 | AU/2310 (ohne Sensoren) alias MarsC1.0
| Vierte und endgültige Codelinie (C++) |
| 2002 / 2003 | AU/2311 (mit Sensoren) - Link zu den Details
| Vierte und endgültige Codelinie (C++) - umbenannt in C.E.R.L.
|
| 2005 (seit 2007 mit Sensoren) | AU/2410 - Link zu den Details
| Vierte und endgültige Codelinie (C++) C.E.R.L.
|
Impressum













{kind=link}